韩信¶
简介¶
本文档旨在提供一个BITO软件系统操作指南,使经培训后的BITO系统操作人员能够完成系统测试或功能展示。
步骤¶
- 先旋转控制电源钥匙,确定急停按钮已解开,启动机器人。确认机器人已开机(显示欢迎界面),手柄可遥控。
- 确认路由器,Hanxin电脑都已开机,可以打开Hanxin电脑谷歌浏览器,主页显示了Hanxin IP地址,若使用笔记本进行远程操控,则在记录IP地址后将浏览器关闭,在笔记本浏览器上输入IP地址,若在Hanxin上直接操控,则不需关闭浏览器。

- 机器人上线的准备工作及上线过程如下图。
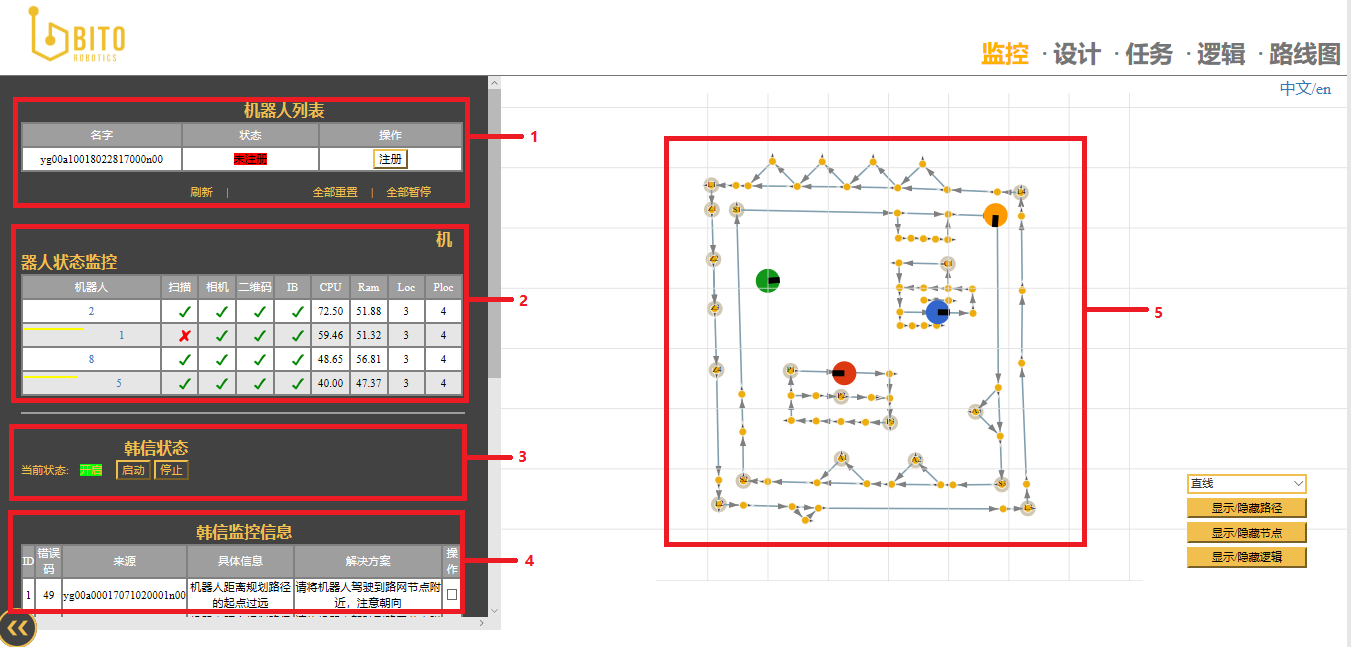
- 打开Hanxin 监控页面,点击区域3中的“启动”来启动hanxin,在区域3可以看到hanxin的当前状态是“on”,点击区域1中的“刷新”,刷新机器人列表,可看到可注册的机器人序列号。
- 观测机器人在交通网络中所处位置, 用手柄将其遥控至专门用于上下线(注册/注销)的节点上(区域5中黄色小圆上,注意:机器人方向也要与黄色小圆上的箭头方向一致)。
- 根据区域2中的显示信息,如果机器人所有状态信息显示正确,可以准备上线,否则参阅故障排除步骤1。
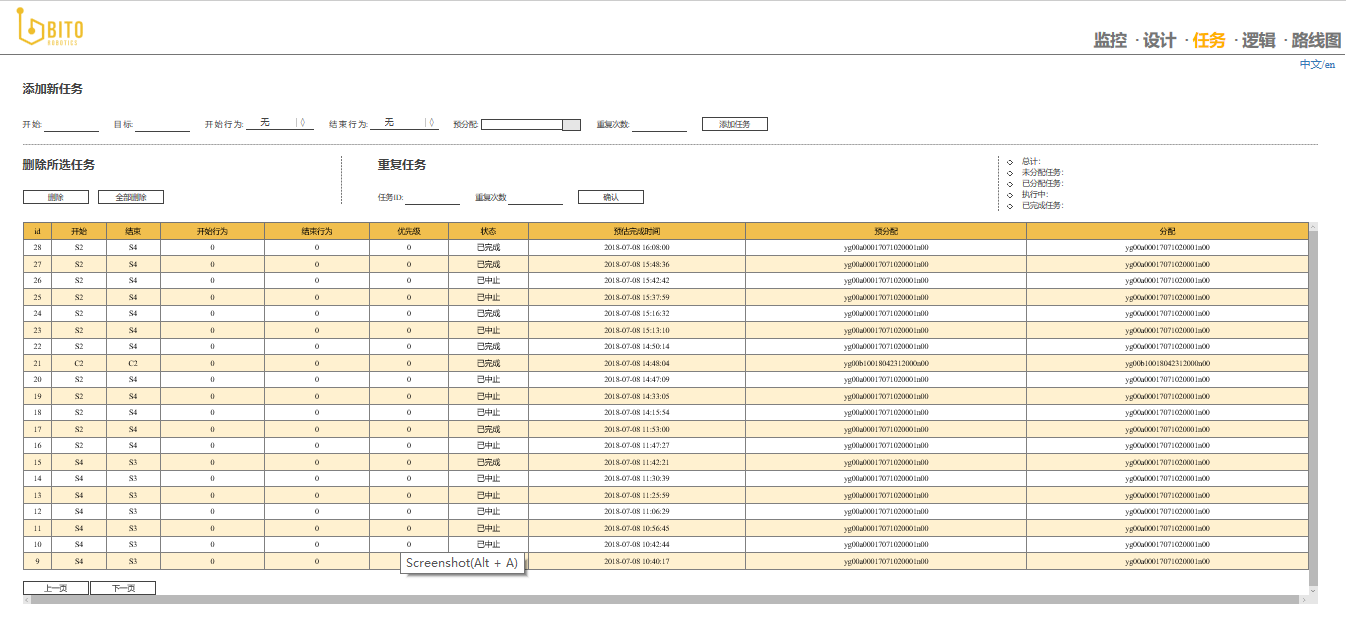
- 按住ctrl后点击“任务”,切换到“任务”页面,确定任务列表中任务为空;若不为空,点击“全部删除”清空任务。
- 在“监控”页面中区域1中选择要注册的机器人,点击“注册”,让其上线,点击“刷新”,会看到机器人已经被注册,状态框将从红色变成绿色。当注册完所有的机器人之后,点击“全部重置”,重置所有的机器人及其状态,等待机器人的升降台升起,如果正常升起到标准高度,则注册成功;如不成功,检查是否遵从了(2)中的注意点。
4. 分配任务。
- 切换到“任务”页面,在任务列表中不断添加新的任务。会观察到每台机器人轻微移动,表明机器人进入到交通网络中并开始执行任务。添加时,注意保护机器人安全。建议每次每台车添加的任务不要超过2个。
- 机器人将行驶到起始点的位置后,执行第一个动作,然后在行驶到终止点的位置,并执行第二个动作。这里的动作共有n种,部分动作解释如下:
| 动作 | 解释 |
|---|---|
| Blank | 无动作 |
| Left Up | 左转90度前进2米插取货架 |
| Left Down | 左转90度前进2米放置货架 |
| Right Up | 右转90度前进2米放置货架 |
| Straight Up | 直行2米插取货架 |
| Straight Down | 直行2米放置货架 |
| Pure Up | 直接原地插取货架 |
| Pure Down | 直接原地放置货架 |
| Charging | 充电 |
- 添加任务指南:填写“开始”的逻辑库位的位置名和动作,以及“目标”的逻辑库位的位置名和动作。在“预分配”中选择机器人的编号。填写任务重复次数,不填默认为1。点击“添加”,刷新页面,可以看到任务列表被更新。
- 演示结束操作事项。
当所有的机器人都演示结束以后,用手柄控制所有的机器人移动到想要停放的位置。按下急停按键。用手柄关机,然后用钥匙关闭电源。在hanxin端,在“任务”页面删除所有的“任务”,关闭hanxin。
注意事项¶
- 机器人测试及展示第一原则:时刻牢记紧急开关所在方位,安全第一。
- 使用手柄控制的时候,请操作人员保持3m以内的距离,以防因为手柄因为距离过远信号延迟,导致机器人失控。
- 系统测试或演示时,原则上每台机器人应有一名工作人员加以保护,在发生意外时可及时按下急停开关,以防发生碰撞等事故。
- 经常检查机器人电压,若低于46V,建议将机器人充电,保护电池,防止机器人测试展示运行时电压过低发生意外。
- 如果领导参观,建议提前一天检查机器人电压并充电,展示当天工作人员提前半小时入场,温习系统展示流程,事先启动Hanxin,Yugong等设备并试运行。
- 建议多测试系统,一方面有利于发现软件系统问题,提出改进建议,另一方面有利于熟悉软件系统,为后续共同向客户交付整套产品系统做准备。
- 执行测试时应完成测试记录,记录测试内容,步骤和问题。
故障排除步骤¶
| 故障现象 | 诊断方法 |
|---|---|
| Monitor界面上单机显示异常 |
|
| 自动运行的机器人停止运动 |
若在行走中停止运动,确认并记录机器人是否走出地图,然后使用手柄控制机器人到地图之外,关闭系统,关闭电源,重新准备注册上线。 |
| 机器人撞到前车 |
|
| 给任务后机器人不动 | 1) 可能是韩信未发送轨迹给机器人, 如要确认, 请查看rosservice call /agent_lookup “serial: ‘yg00xxxx’”,在命令行的返回值的前几行 查看state_name, 若state为online, registered或permitting_state(在韩信UI task页面显示created或者scheduled的状态), 则很有可能 是中控系统调度问题, 若state不为之前说的三种state, 则很有可能是单机层面的故障, 详情见下面描述: 2) 可能是IB断电,打开机器人,查看IB指示灯; 3) 可能是IPC断电,打开机器人,查看指示灯; 4) 可能是底层控制软件不执行ROS速度信号,远程ssh登录机器人,rostopic echo /xxx/base_cmd来查看机器人是否有速度值,速度值不为0, 可确认底层控制软件不执行ROS速度信号; 5) 可能是上层控制软件没有发送ROS速度信号,远程ssh登录机器人,rostopic echo /xxx/base_cmd来查看机器人是否有速度值,速度值为0, 可确认上层控制软件没有发送ROS速度信号; 6) 可能是急停没松,叉车处在手动模式; 7) 可以先用手柄遥控一下,如果可以动,说明可能是触发了保护机制,系统处于软急停状态,检查屏幕上的故障码信息,或者agent monitor 的log,(yugong/log/node_start_agent_monitor.warning)查看故障原因; 8) 如果手柄遥控也不动,可能是上面提到的硬件原因,或者是手柄没电了 |